
Mit Automatisierungsanlagen der Häcker Automation steht Dir das Equipment zur Verfügung, um die Vielfalt Deiner Prozessschritte auf einer Anlage abzubilden.
Die präzise Bestückung von Leiterplatten sowie hochempfindlichen und geometrisch anspruchsvollen Bauteilen im Mikro- und Nanobereich hat viele Einflussgrößen, die auf das perfekte Ergebnis einwirken. Von der Bestückung in extrem tiefe Kavitäten bis zur Bestückung von berührungsempfindlichen Bauteilen, in unserem Portfolio findest du die clevere Lösung für Deinen individuellen Bedarf.
Eine der vielen Moduloptionen in unseren Anlagen ist die Verwendung eines Smarpods, zur hochpräzisen Ausrichtung von Substraten und Bauteilen. Hiermit kann in sechs Freiheitsgraden manipuliert werden, und das bei Positioniergenauigkeiten kleiner 10nm. Die Bestückung von dreidimensionalen Baugruppen ist dabei ebenso anwendbar wie die SMD Bestückung einer Leiterplatte.
Um dies zu veranschaulichen, siehst Du einen Demonstrationsprozess in unserem Video.
Das Verarbeiten sensibler Bauteile ist eine besondere Herausforderung in der Prozessgestaltung. Sicheres Lösen aus dem Zuführsystem, das hohe Risiko von Beschädigungen während des Pickups oder das anschließende Placing mit einer definierten Einsinktiefe in ein Dosiermedium, sind Aufgaben, die während des Bestückungsvorgangs realisiert werden müssen.
Für diese komplexen Prozessschritte entwickelte Häcker Automation den Touchdown Placer, PLACER TD.
Dieser Bestückungskopf wurde für die genaue Ausrichtung und Platzierung von Bauteilen konzipiert. Er kommt unter anderem zum Einsatz, wenn auf druckempfindlichen Substraten bestückt werden soll oder eine äußerst exakte Messung der Substrathöhe notwendig ist.
Hierfür verfügt der Placer über einen induktiven Abstandssensor in Z-Richtung, welcher detektiert, wann das Bauteil auf der Oberfläche des Substrates aufsetzt.
Weiterhin ist es möglich, das Bauteil in Z-Richtung mit einer definierten Tiefe in einem viskosen oder flüssigen Medium zu positionieren.
Hebe deinen Die-Bondingprozess auf ein völlig neues Niveau. Denn zunehmende Produktminiaturisierung und volatile Märkte bringen die traditionelle Chipverarbeitung schnell an ihre Grenzen. Ein umfangreiches Dosierequipment steht für das Applizieren deines präferierten Fügematerials bereit. Mit Hilfe von Bonding Tool Sets und intelligenter Bestücktechnologie garantieren wir das sichere und präzise Handling deiner Dies. Das gesamte Bondingequipment beruht auf einem modularen Konzept und ist somit wieder verwendbar und ersetzbar.
Zu Beginn des Prozesses befinden sich die Dies/Chips, welche im Folgenden verarbeitet werden sollen auf einem Wafer, der in einen Frame gespannt wird.
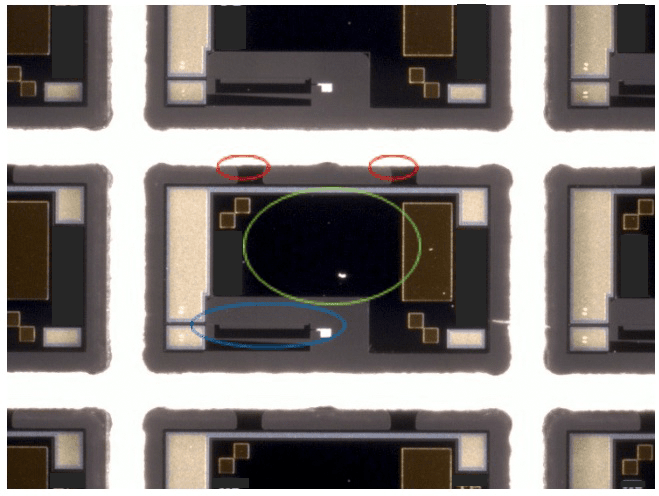
Um das Sorting erfolgreich durchzuführen, ist es wichtig zu wissen, in welchem Bereich die Ausstechnadel und das Aufnahmetool das Bauteil angreifen bzw. manipulieren dürfen (hier grün in ABB. 1 dargestellt). Beide dürfen nur in diesem Bereich am Bauteil angreifen, da es sonst zu Beschädigungen kommen kann und die Funktionalität nicht mehr gewährleistet ist. Die roten Bereiche zeigen die Sollbruchstellen, an denen das Bauteil kontrolliert herausgebrochen werden muss.
Beim Herausbrechen der Bauteile ist stets darauf zu achten, dass es zu keinen Absplitterungen an diesen Stellen kommt.
Für diesen Pickup-Prozess wird unter anderem eine Waferausstecheinheit (auch Die-Eject Unit) sowie passende Nadeln und Rubber- oder Stahltools verwendet. Handelt es sich um empfindliche Substratoberflächen, auf denen keine Rückstände zurückbleiben dürfen, wird die Verwendung eines Stahltools empfohlen.
Zu beachten sind die mit dem Herausbrechen und Aufnehmen einhergehenden Parameter, wie Anfahrhöhen, Aufnahmehöhen, Nadelstarthöhen, Ausfahrhöhen, Geschwindigkeit und Wartezeit.
Die aufgenommenen Bauteile werden anschließend mittels Unterseitenkamera auf ihre Lage sowie auf Brüche kontrolliert und die Gutteile in ein Zuführsystem, zum Beispiel ein Gel Pack oder ein Waffle Pack sortiert.
Abb. 1: Produkt auf dem Wafer.
Die Substratzuführung und -bereitstellung wird beispielsweise mittels Boat und einem Carrier auf einem Vakuum Support realisiert. Vor dem eigentlichen Fügeprozess erfolgt eine Inspektion der einzelnen Positionen auf dem Substrat, welche bestückt werden sollen. Diese Positionen wurden anschließend als Referenzen für die Bestückung genutzt.
Danach wird das entsprechende Dosiermaterial appliziert. Im gezeigten Prozessbespiel geschiet dies mittels Pin-Transferverfahren und der dafür notwendigen DDU.
Der benetzte Chip wird dann auf dem Substrat platziert. Im Nachgang kann eine automatische optische Inspektion der Produkte erfolgen.
Komplexe elektronische Schaltungen werden zunehmend als integrierte Halbleiter realisiert. Es hat sich bewährt, die Ein- und Ausgänge für die Steuersignalübertragung auf der Unterseite des Bauteils in Form eines Arrays vorzusehen. Neben kürzeren Laufzeiten bietet dies auch Vorteile bei der Wärmeableitung.
Aufgrund des Halbleiterherstellungsprozesses befinden sich die Leiterbahnen eines Chips auf der Oberseite des Wafers. Daher ist es erforderlich, die Bauteile vor der Bestückung zu drehen. Dieser Prozess ist als Flip-Chip-Montage bekannt. Flip-Chip-Montagesysteme müssen aufgrund der geringen Abstände zwischen den Kontaktpads und ihrer Array-förmigen Anordnung außergewöhnliche Genauigkeiten gewährleisten.
Neben der Positionierung im Bereich (X und Y) ist die Rotation um die Z-Achse (Theta) des Bestückkopfes entscheidend.
Häcker Automation bietet für die Flip-Chip-Montage eine integrierte Prozesslösung. Der erste Prozessschritt erfordert das Auftragen eines leitfähigen Klebers oder einer Lotpaste auf das Substrat, um die anschließende Kontaktierung entweder durch UV-Licht oder durch Wärme zu ermöglichen. Der Flip-Chip-Prozess selbst beginnt mit dem Auswerfen einzelner Waferchips aus einem gewürfelten Wafer, der auf einem Band in einem Rahmen montiert ist. Es können verschiedene Waferdurchmesser und Chips mit unterschiedlichen Größen und Dicken verwendet werden. Das Auswurfsystem ist fester Bestandteil und kann bei Umstellung auf andere Produkte einfach ausgetauscht werden. Auch hochempfindliche und dünne Stümpfe können verarbeitet werden.
Die Wendestation sorgt für das Wenden des Bauteils, das dann an der gewünschten Position auf dem Substrat platziert werden kann. Das hochpräzise Portalsystem der VICO Basismaschine sorgt für die erforderliche Bestückgenauigkeit. Die notwendige Bestückgenauigkeit von besser als 10 µm wird durch die optional erhältlichen Kamerasysteme und die Fehlerkorrekturalgorithmen in der Steuerungssoftware sichergestellt. Die Halbleiter-Dies können als Bare-Dies auf dem Substrat platziert oder zu Gehäusen wie BGA weiterverarbeitet werden.
Eine Flip-Chip-Prozesslösung kann mit Dosierprozessen wie Glob Top, Conformal Coating oder anderen Mikromontagetechnologien wie 3D-Montage erweitert werden.

Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
